These have been done and sitting for a couple weeks. Now I’m finally getting around to playing again.
Wheel encoder board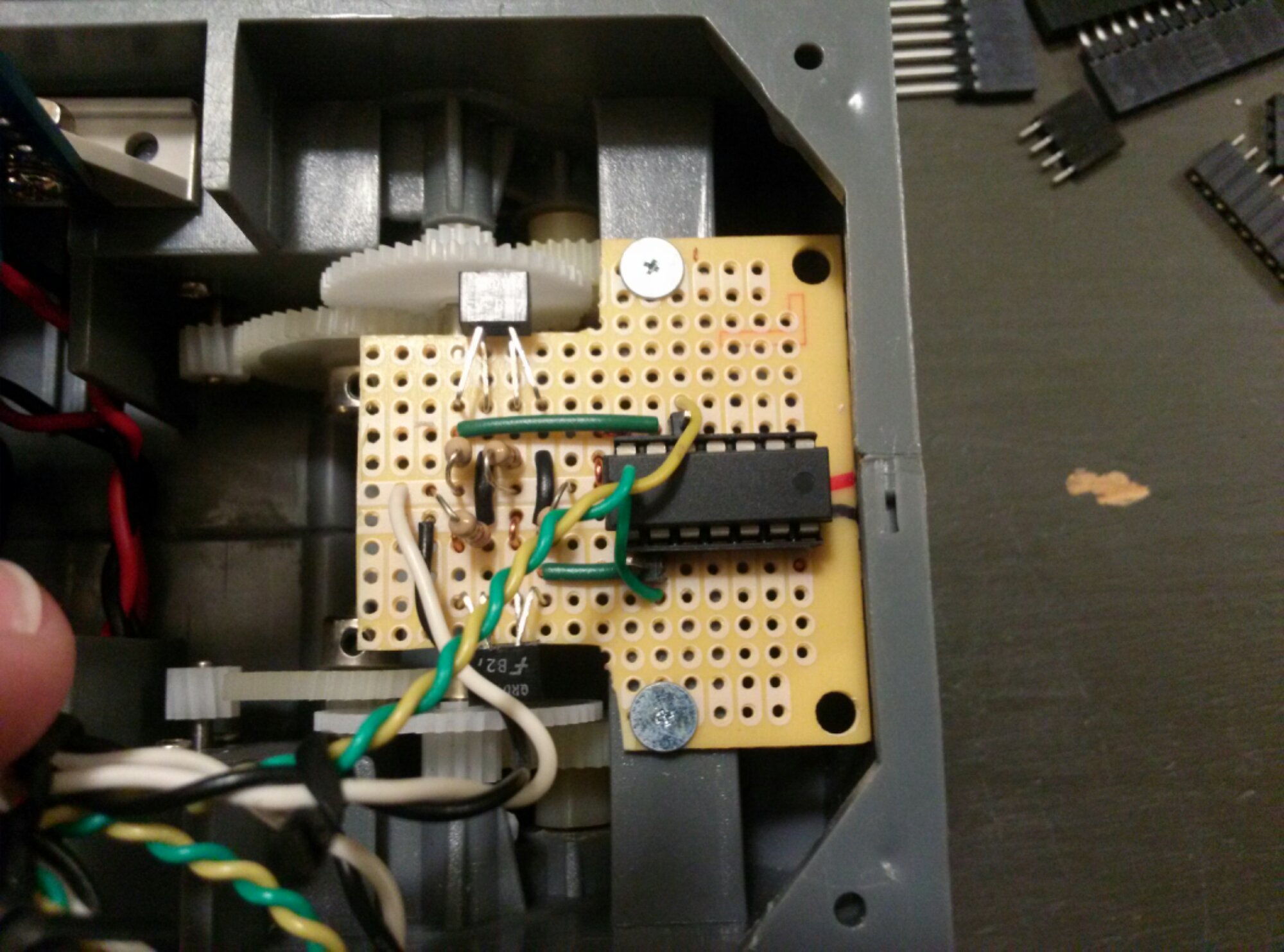
Motor controller
Now it’s time to get to some coding to see this thing actually spin its wheels.
These have been done and sitting for a couple weeks. Now I’m finally getting around to playing again.
Wheel encoder board
Motor controller
Now it’s time to get to some coding to see this thing actually spin its wheels.